Шина данных LIN
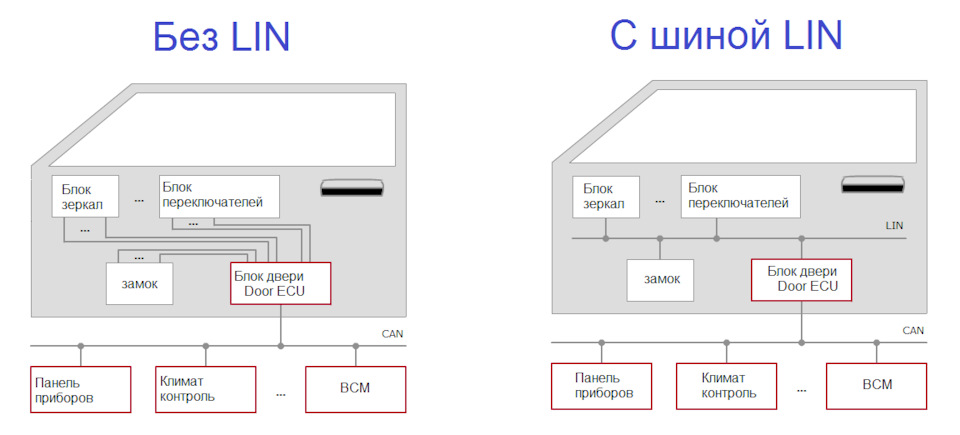
Для локального использования в электронике кузова и систем комфорта применяют шину данных LIN(Local Interconect Network). Это недорогая альтернатива CAN, но в отличие от неё в LIN блоки компоненты не равноправны, а сама шина работает по принципу "ведущий-ведомые", то есть блок управления управляет подчинёнными блоками управления, сервомоторами и т.п. К шине данных LIN можно подключить только ограниченное количество абонентов — 16. Скорость передачи достигает 20 кбит/с.
Шина данных LIN чазе всего применяется для регулировки климата салона автомобиля и в электронике систем комфорта.
В отличие от шины CAN, в LIN каждый подчинённый компонент имеет свой определённый запрограммированный и неизменный адрес. Каждый абонент шины фиксирует передачу данных, но принимает и отвечает на информацию только в том случае, если им идентифицирован собственный адрес, а передача данных прошла без ошибок.
Сначала происходит пауза синхронизации, после которой все блоки управления настраиваются на один "такт". После этого Задающий блок управления посылает заголовок. Заголовок состоит из поля синхронизации и идентификационного поля, в котором содержится информация об адресе. После заголовка идёт поле ответа.
Поле ответа содержит либо ответ подчинённого блока либо указание ведущего.
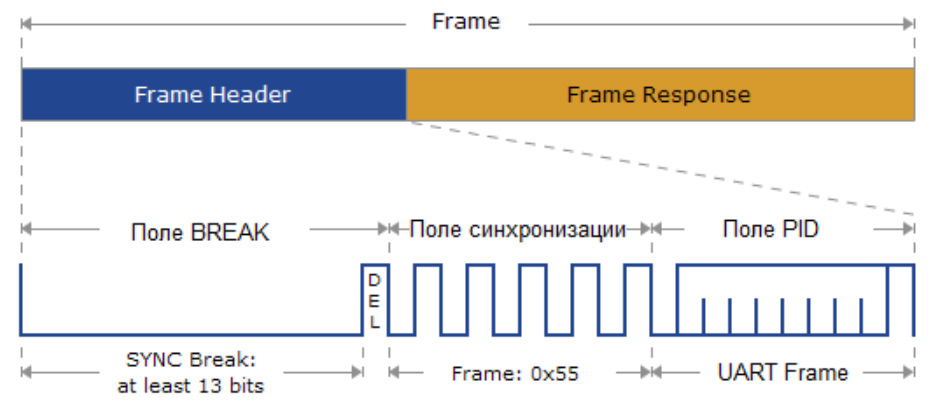
структура кадра LIN
Ошибки передачи данных сохраняются в памяти и могут быть в дальнейшем диагностированы тестером. Если задающий блок через определённый промежуток времени не получает сигнал от подчинённого блока, то связь может быть нарушена по следующим причинам:
— обрыв линии или короткое замыкание
— неправильная подача напряжения
— выход из строя подчинённого блока
— неправильная можель задающего или подчинённого блока
Если связь между задающим и подчинённым блоками невозможна, то это может быть:
— программная проблема из-за неправильно модели
— помеха из-за электромагнитных воздействий
— изменение сопротивлений на линии передачи данных в результате коррозии контактов
Если вся система выходит из строя и невозможно считать память ошибок, то неисправность нужно искать около задающего блока.
Шину данных LIN, как и CAN, можно диагностировать с помощью осциллографа, однако поток информации будет сравнительно мал и её надо вызывать путём ввода или изменения(например путём изменения скорости вентилятора).